近日,中国科学技术大学自动化系阚震教授团队,在机器人顶刊《The International Journal of Robotics Research》(以下简称IJRR)上发表了题为“Real-Time Reactive Task Allocation and Planning of Large Heterogeneous Multi-Robot Systems with Temporal Logic Specifications”的研究论文,自动化系博士研究生陈子扬为该论文的第一作者,阚震教授为本文的通讯作者。该项研究得到了国家自然科学基金的资助。
IJRR创刊于1982年,是第一本有关机器人研究的学术出版物,也是当今机器人学领域的顶刊。IJRR致力于提供领域内杰出学者针对突破性前沿问题、技术发展和机器人学理论等方面研究撰写的开创性原创论文。惠及应用数学、人工智能、计算机科学,电气和机械工程等多个领域。
机器人技术发展的重要愿景之一就是在人类不能或难以到达的已知或未知环境下为人类工作。近年来,机器人在民生服务、养老助残、国防军事、工业生产、医疗救援等领域发挥着越来越重要的作用。在这些应用中,具有不同感知和操作能力的机器人可以组成异构多机器人系统来完成具有很大通用性的特定任务。然而,目前的规划方法存在求解规模受限,求解时间长等问题,严重影响了其在实际环境中的应用。
针对上述问题,阚震教授研究团队提出了一种高效的异构多机器人任务规划与分配方法,构建了时空系统模型并设计了基于规划树的前向模拟规划方法,有效解决了异构机器人时序任务的反应式规划问题。该方法能实现上万台异构机器人的实时规划,解算效率比现有方法提升了多个数量级。该工作进一步提出了交错规划树算法,可以处理多耦合任务的联合规划问题,极大地提升了机器人处理局部任务的反应式规划能力。该工作提出的方法具有极高的任务表征和规划能力,在自动化医疗、自动化农业和物流运输等领域有巨大的研究价值和广泛的应用前景。
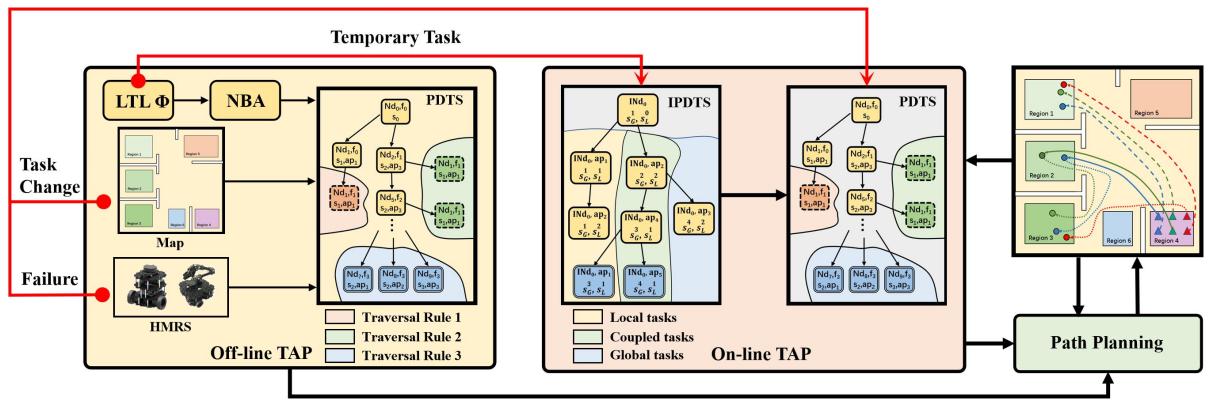
图1. 异构智能体的反应式任务规划框架
阚震教授团队所在实验室:智能控制与机器人实验室(ICR,链接http://staff.ustc.edu.cn/~zkan/)
版权所有© 中国科学技术大学信息技术学院自动化系 皖ICP备05002528号
地址:安徽省合肥市蜀山区黄山路443号,邮政编码:230026